ドールとタミヤ「ファイターネクスジェン(DT-04)」 (組立編3)

続きを始めます。

ここから、「B」の袋を使います。

中には、バネやアジャスター、U字シャフトなどが入っています。
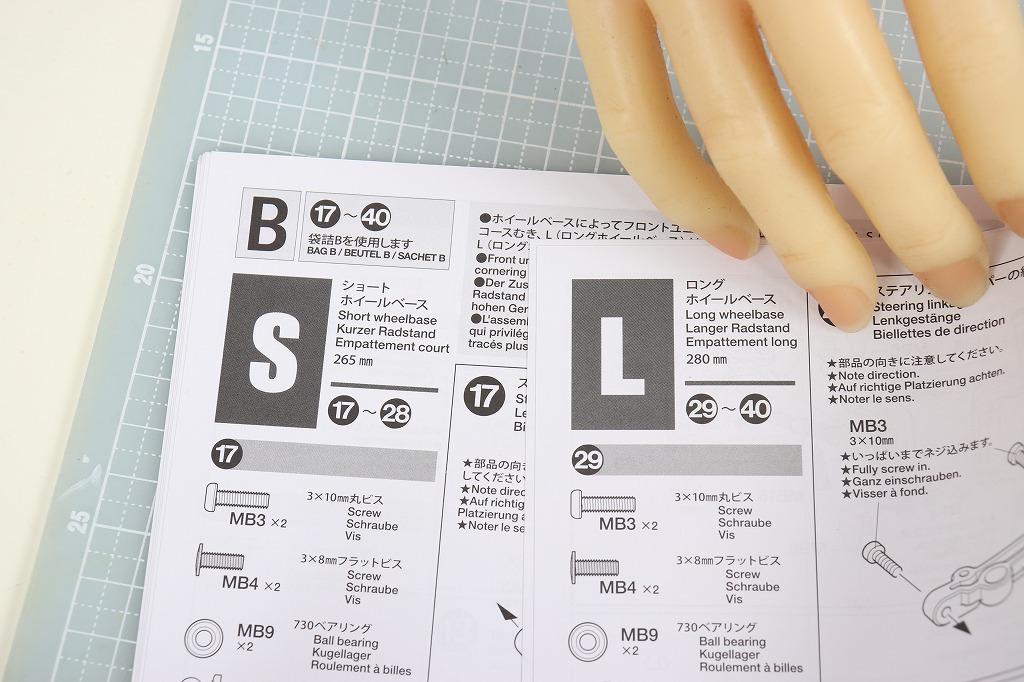
そして、ここから小回りが利く「ショートホイールベース」か、直進でスピードが出る「ロングホイールベース」かを選んで組み立てる必要があります。今回はスピード重視ではないので、ショートホイールベースで作ります。

まずは、ステアリングワイパーを作ります。

ステアリングロッドを3本作り…
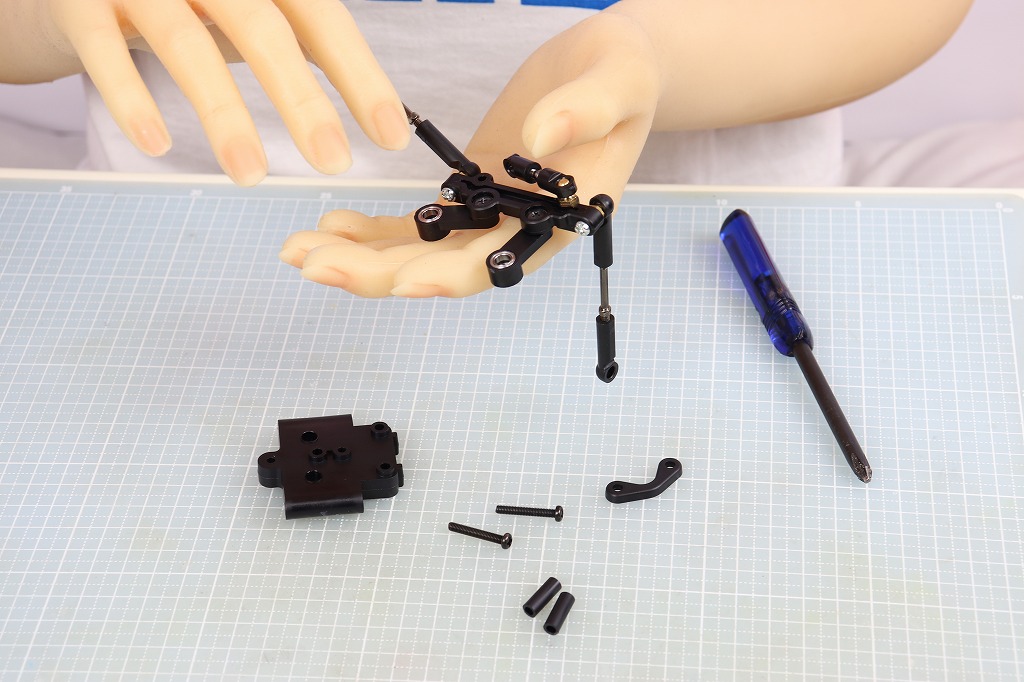
ステアリングワイパーに取り付けます。
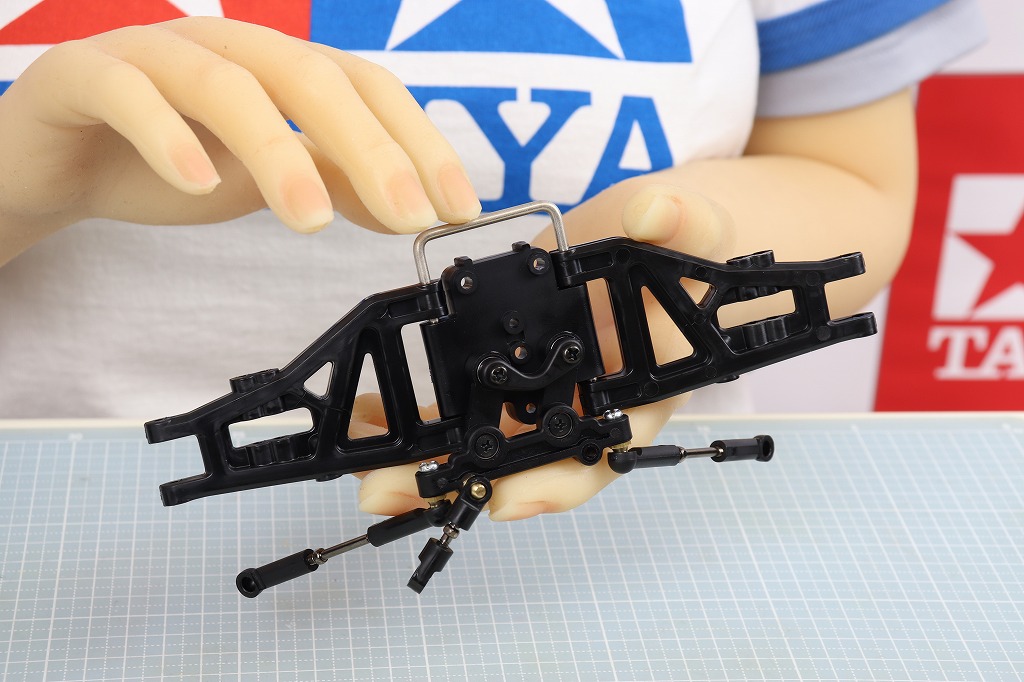
これにフロントロワアームをU字シャフトで固定します。このロワアームをひっくり返して取り付けると、ロングホイールベースになります。

さらに、フロントアッパーアームを作り…

バンパーと共に取り付けます。
こんな感じです。ロングホイールベースの場合、アッパーアームがターンバックルシャフトのロッドになります。

ここで、フロントのオイルダンパーを作ります。

とりあえず、必要なパーツを用意しました。

まずは、シリンダーにピストンを通し、アジャスターを付けます。

で、オイルを入れます。

気泡が無くなったら、しっかりとフタをします。

バネを付けて…

フロントダンパーの完成です。

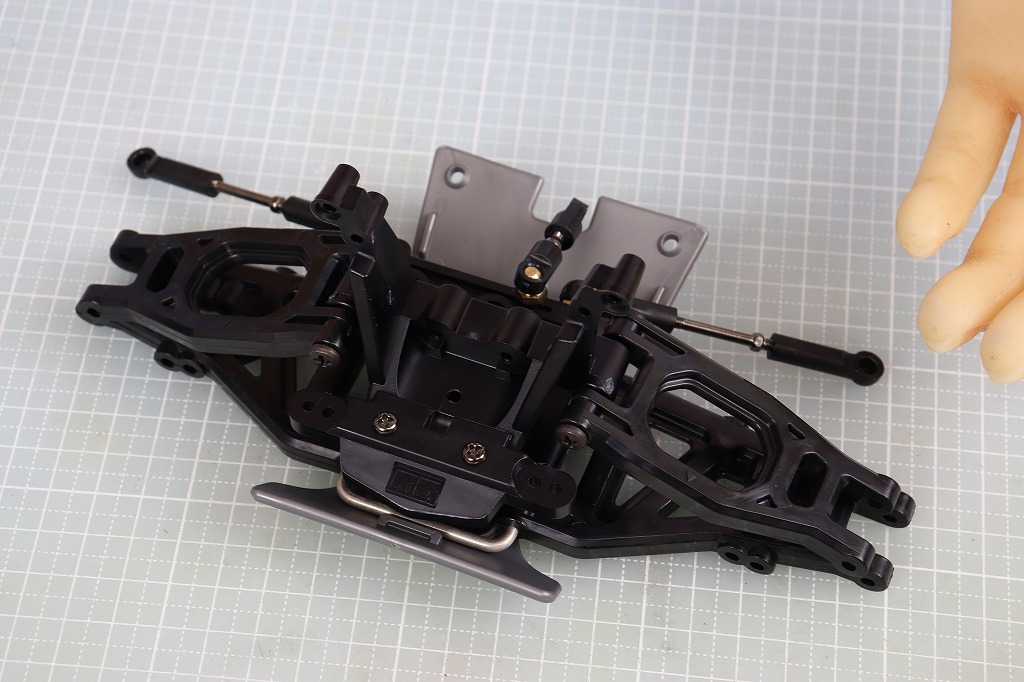
ダンパーを付ける前に、タイヤを取り付ける部分、フロントアクスルを作ります。

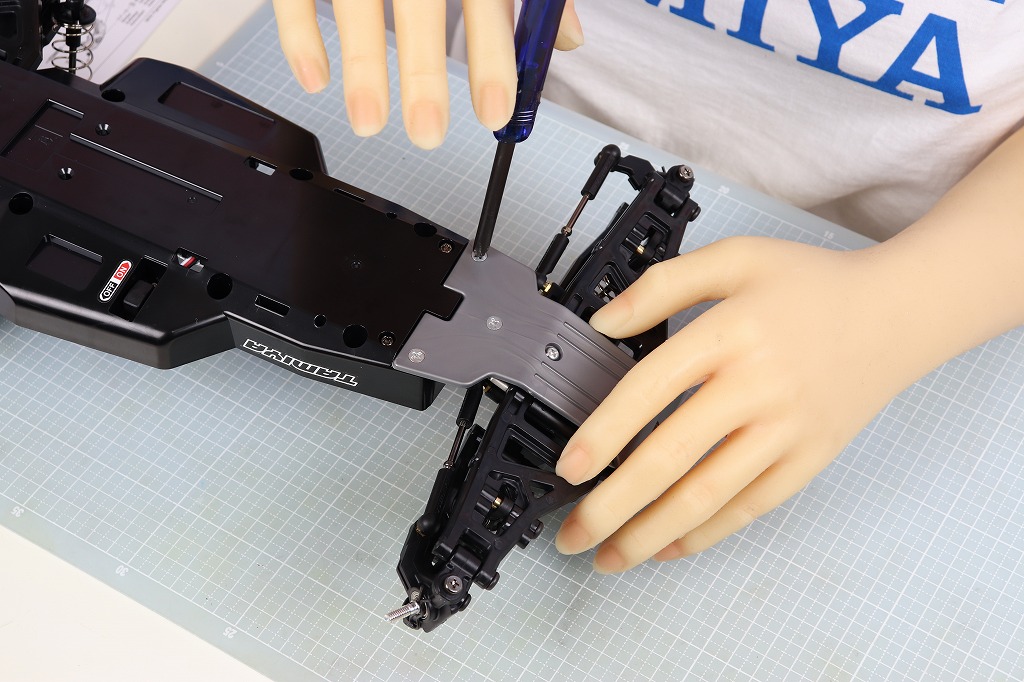
これとダンパーステーをフロント部に取り付けます。

で、フロントダンパーを付けて…
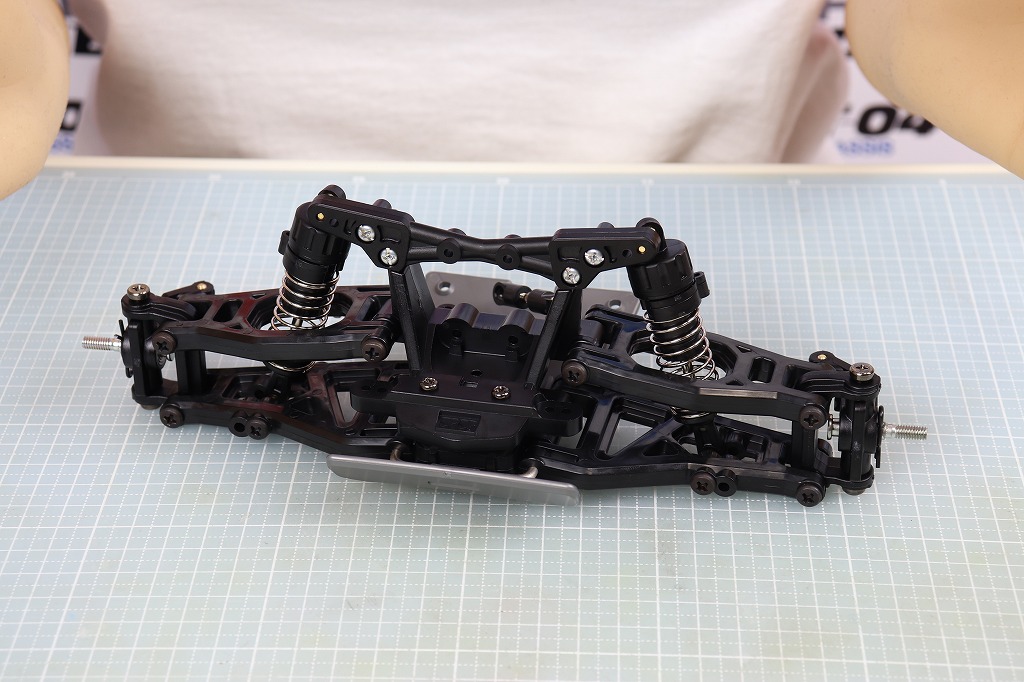
フロント部の完成です。
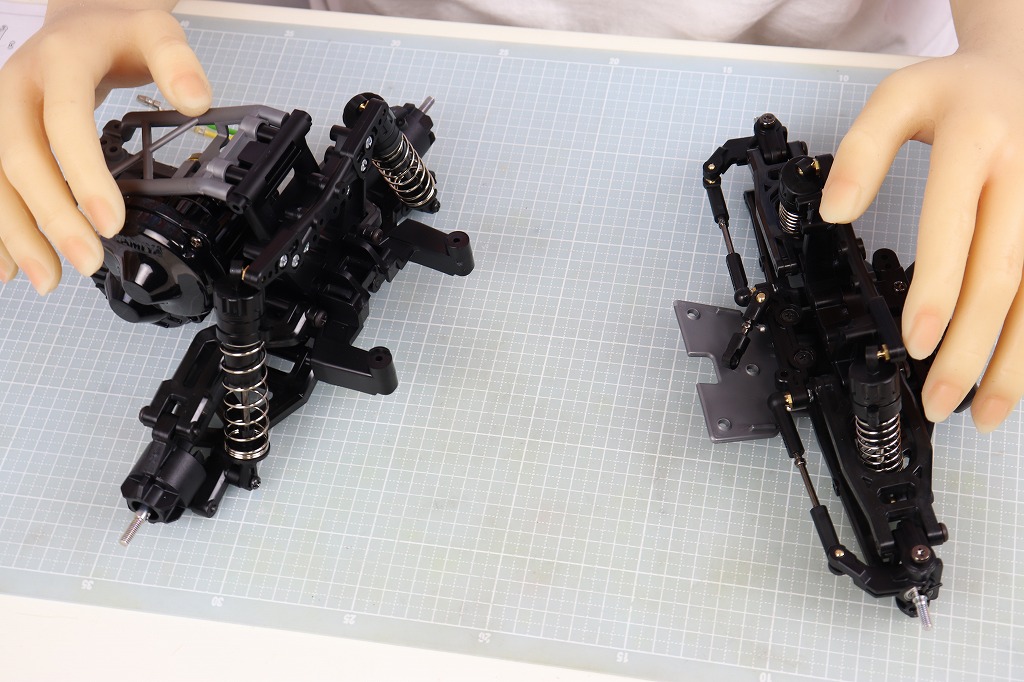
ということで、フロントとリヤができました。

もし、2台目を作ることがあるなら、ロングホイールベース仕様で作りたいと思います。

ここから、最後「C」の袋を使います。

中には、バンドや両面テープ、グラステープやウレタンシートなどが入っています。

そして、電動パーツの出番です。
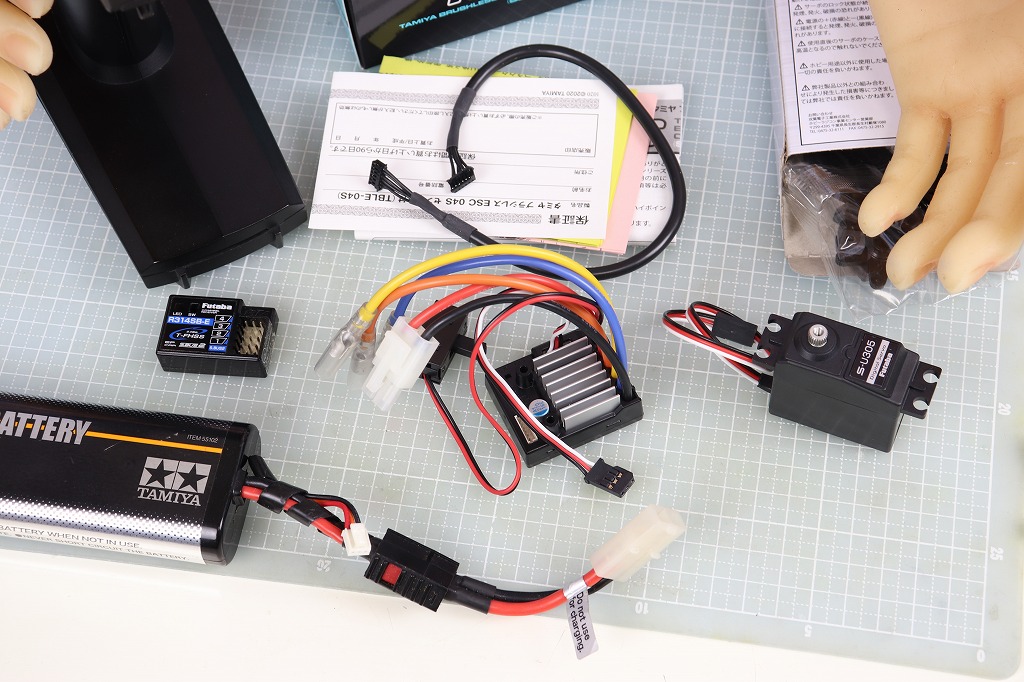
開封しました。何度も使っているので特に説明はいらないと思いますが、スピードコントローラーだけは注意です。初期設定が「ブラシレスモード」になっています。
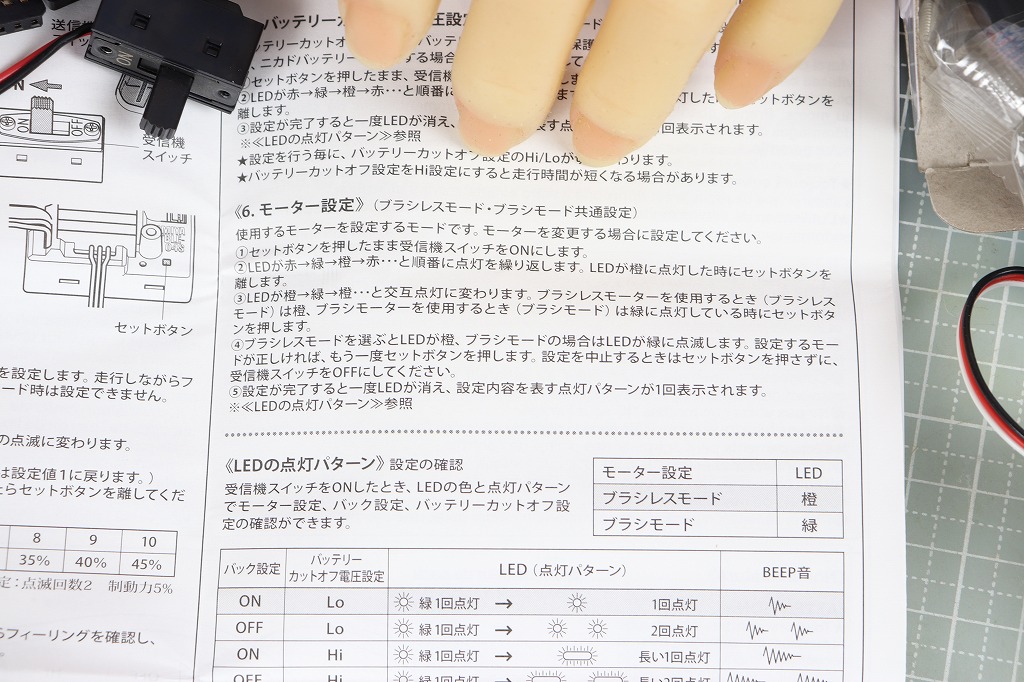
今回はトルクチューンモーターを使うので、モーター設定を「ブラシモード」に変更する必要があります。取説に書いてありますが、LEDの色を見ながらSETボタンを押して変更します。
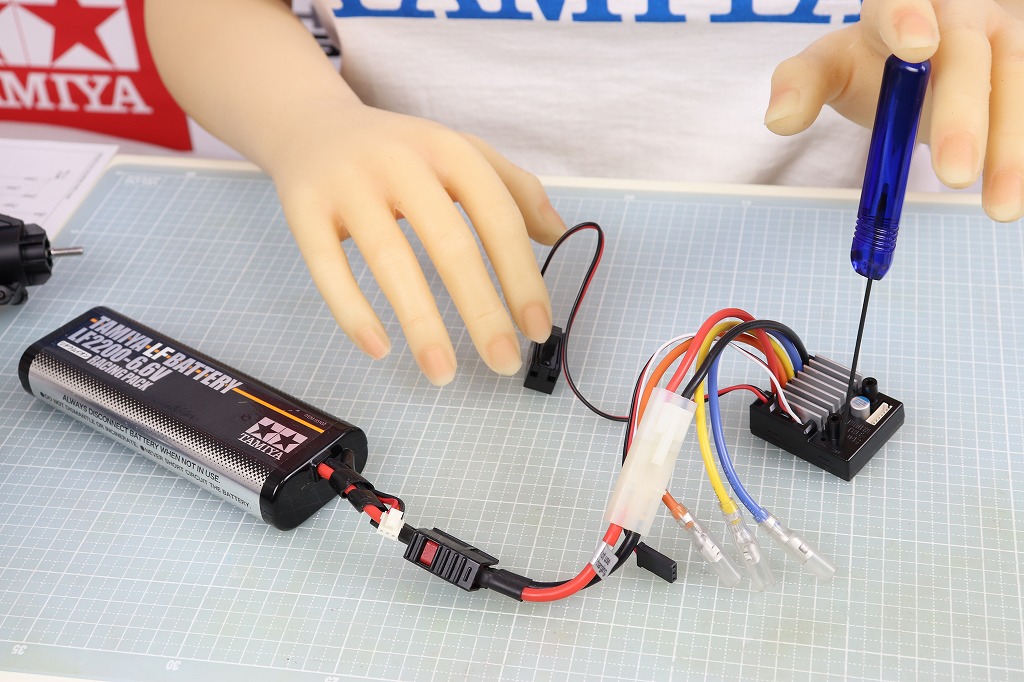
ということで、バッテリーを接続し、設定を変更しましょう。
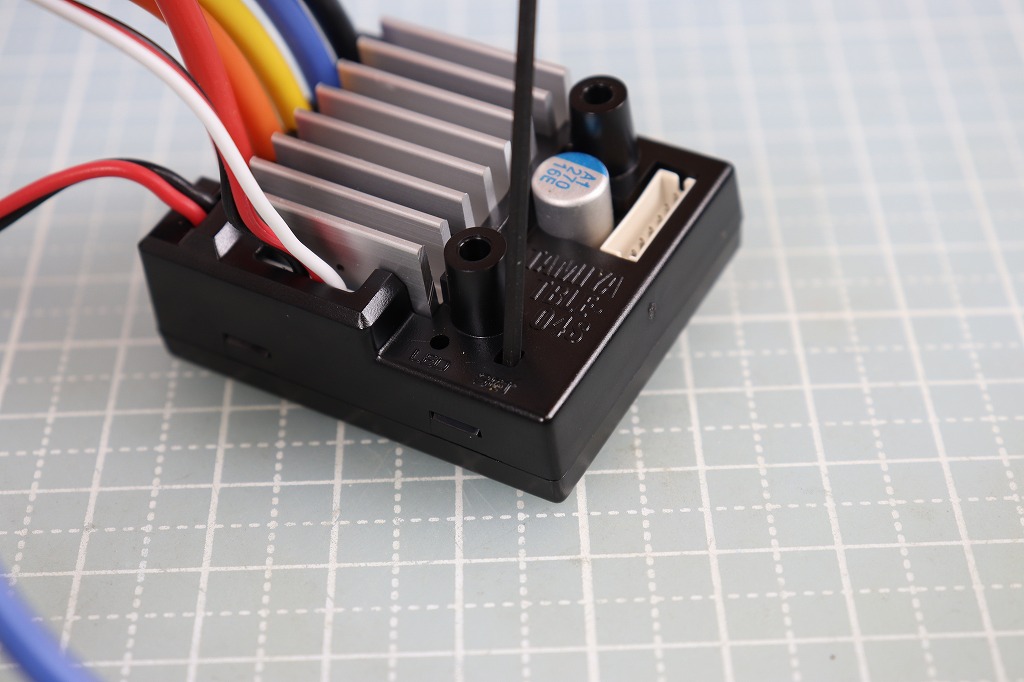
SETボタンは爪楊枝や細い棒を使って押します。
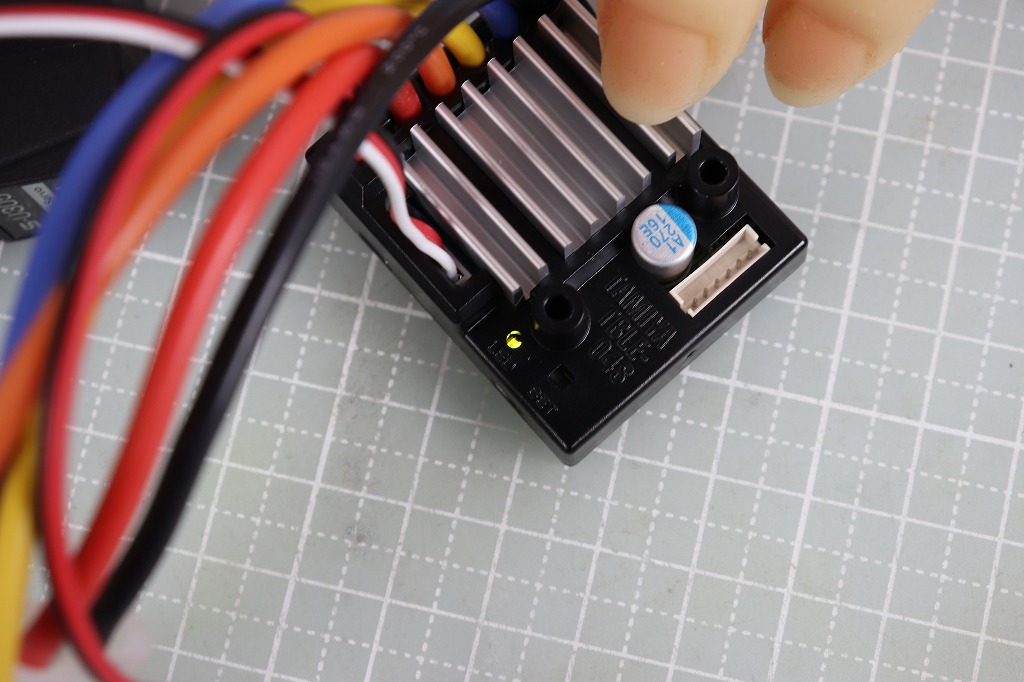
電源を入れ、LEDオレンジでSET→LED緑でSET→LED緑点滅でSET、と計3回SETボタンを押して完了です。ブラシモードはLEDが緑色です。

電動パーツを接続し、サーボのニュートラルを確認します。ついでにモーターのチェックもしておきましょう。…よし、確認しました。モーターもOKです。

サーボには「OP-1159 ハイトルクサーボセイバー用アルミホーン(F104)」とハイトルクサーボセイバーを取り付けます。アルミホーンはハイトルクサーボセイバーとセットで使う必要があります。
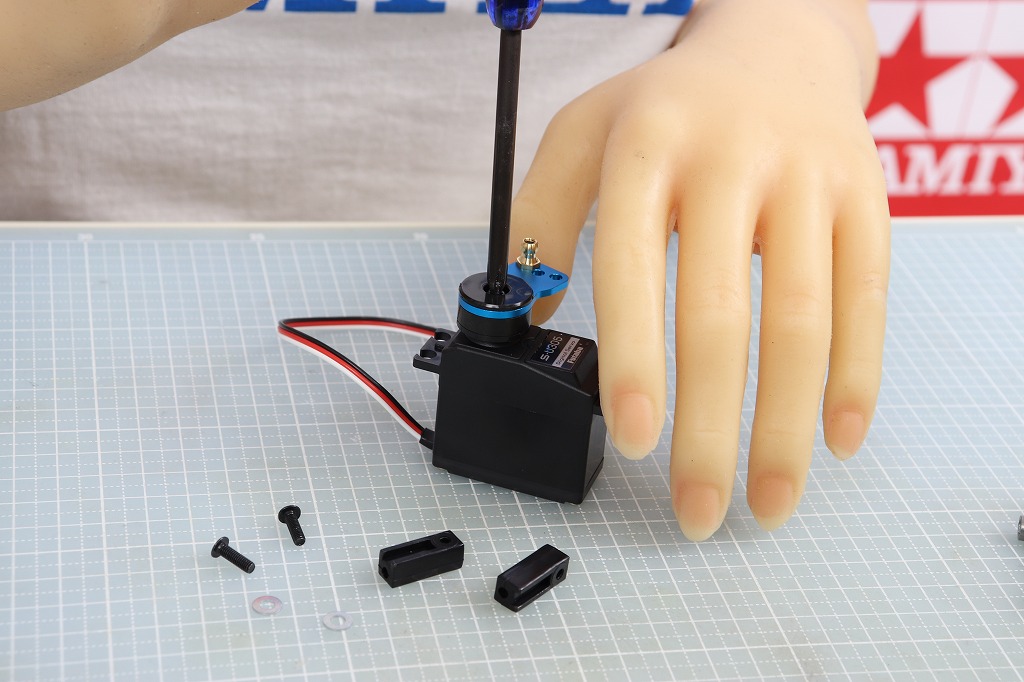
これらとサーボステーをサーボに取り付けます。

そして、最初にシールを貼った、シャーシフレームの登場です。
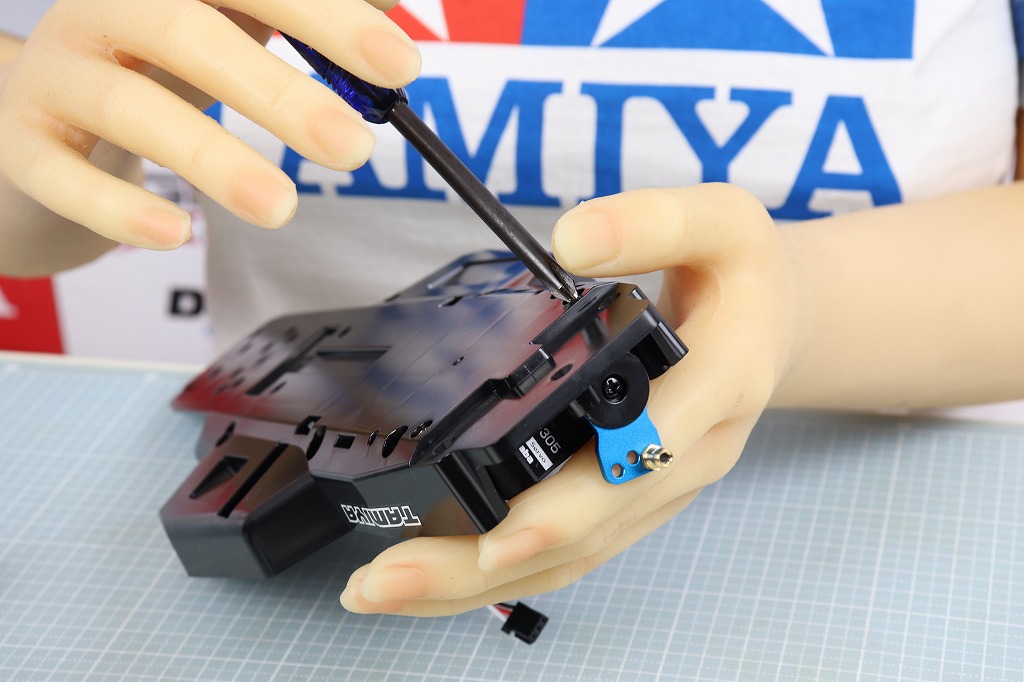
これに裏からサーボを固定します。

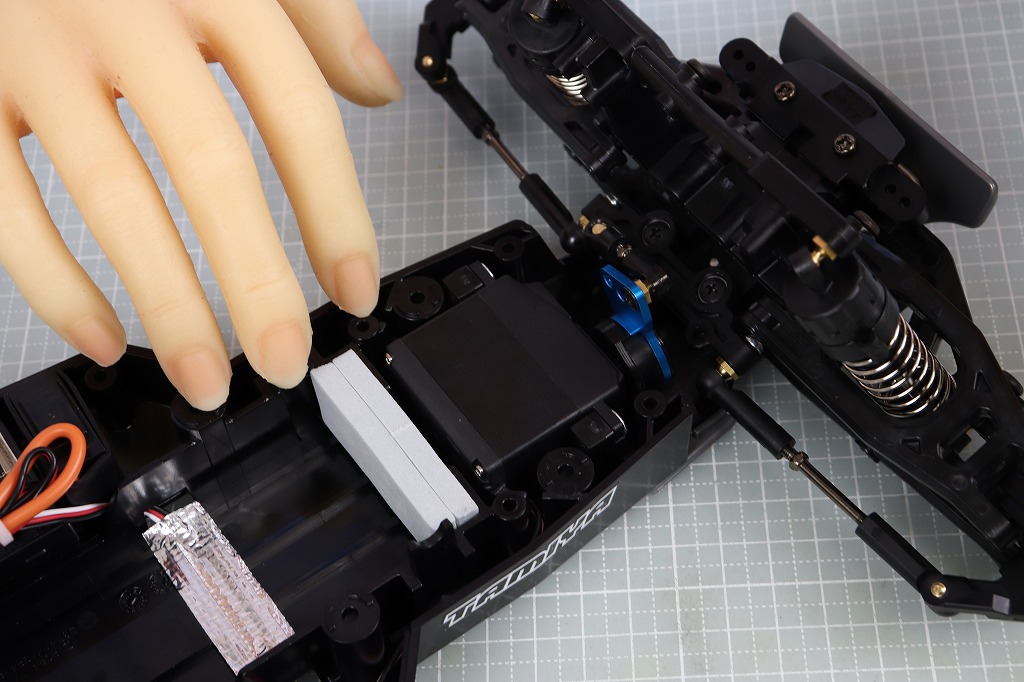
受信機とスピードコントローラーは両面テープで貼り付けます。さて、どこに付けようか…
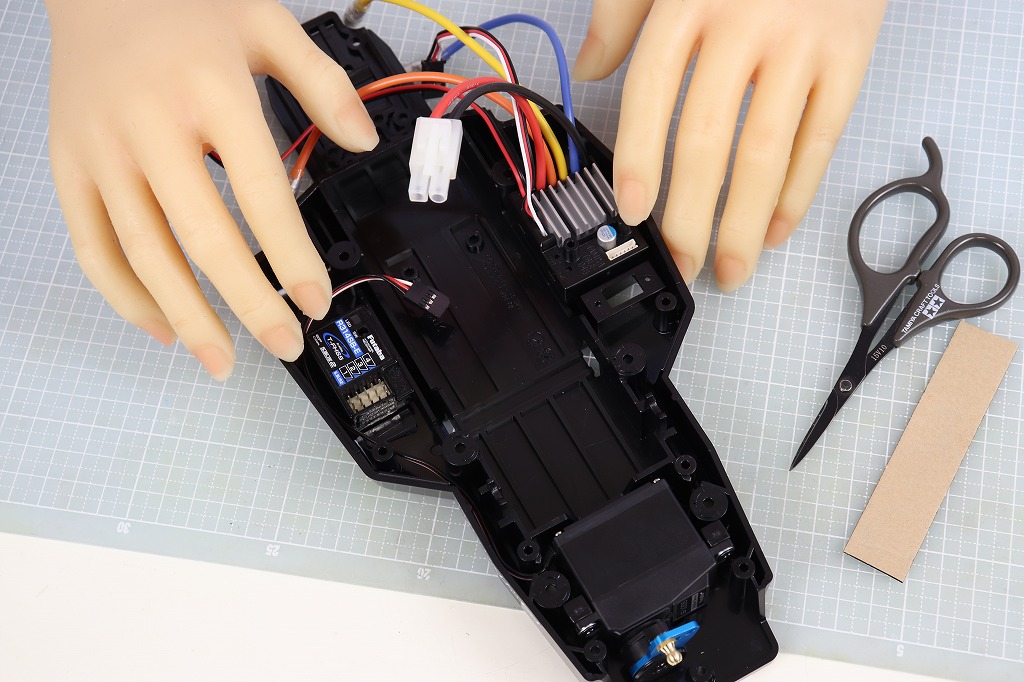
この位置に貼り付けました。…って、ここしかスペースがありません。

スイッチはカバーを付けて裏からネジ止めし、付近にON-OFFシールを貼っておきます。
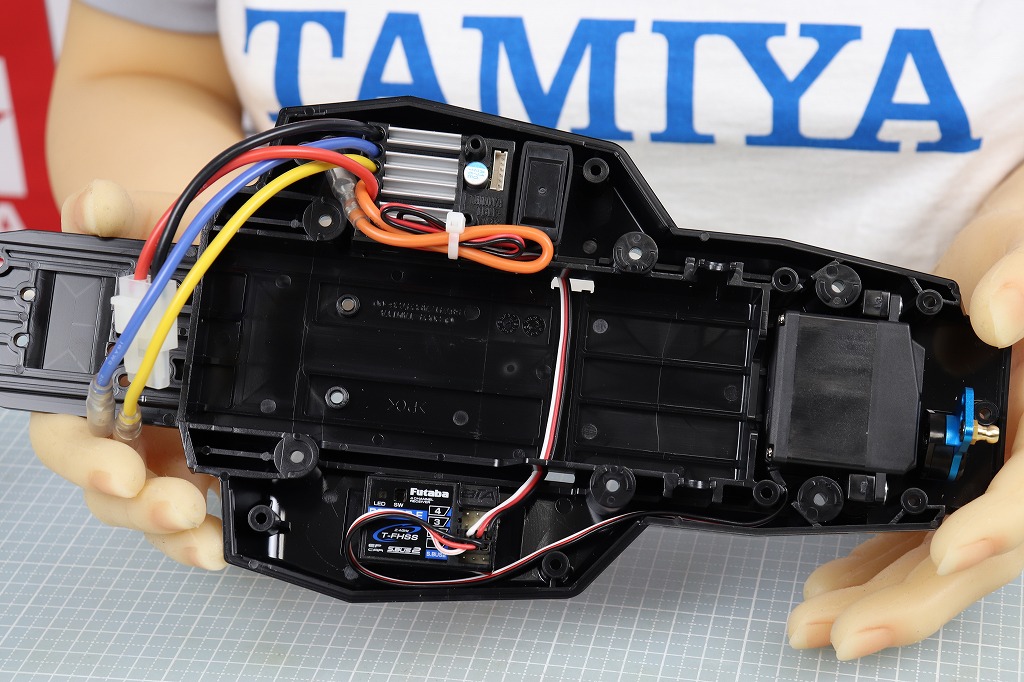
ケーブルを接続し、バンドでまとめました。ブラシモーターなのでオレンジのモーターケーブルは使用しません。もちろん、センサーケーブルも使いません。
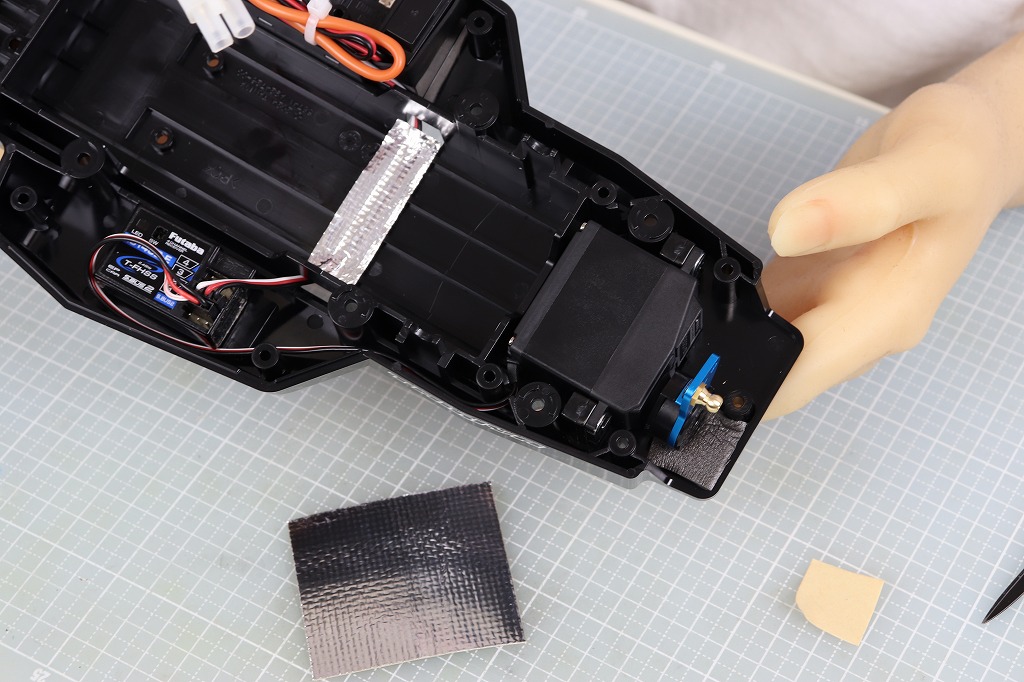
サーボセイバーの部分にスポンジを、ケーブルの上にアルミグラステープを貼ります。スポンジはサーボを付ける前に貼った方がよかったです。

で、リヤ部を取り付けます。
さらに、フロント部も付けます。
サーボとステアリングロッドを接続し、バッテリーがガタつかないように、ウレタンシートを2枚重ねて貼ります。
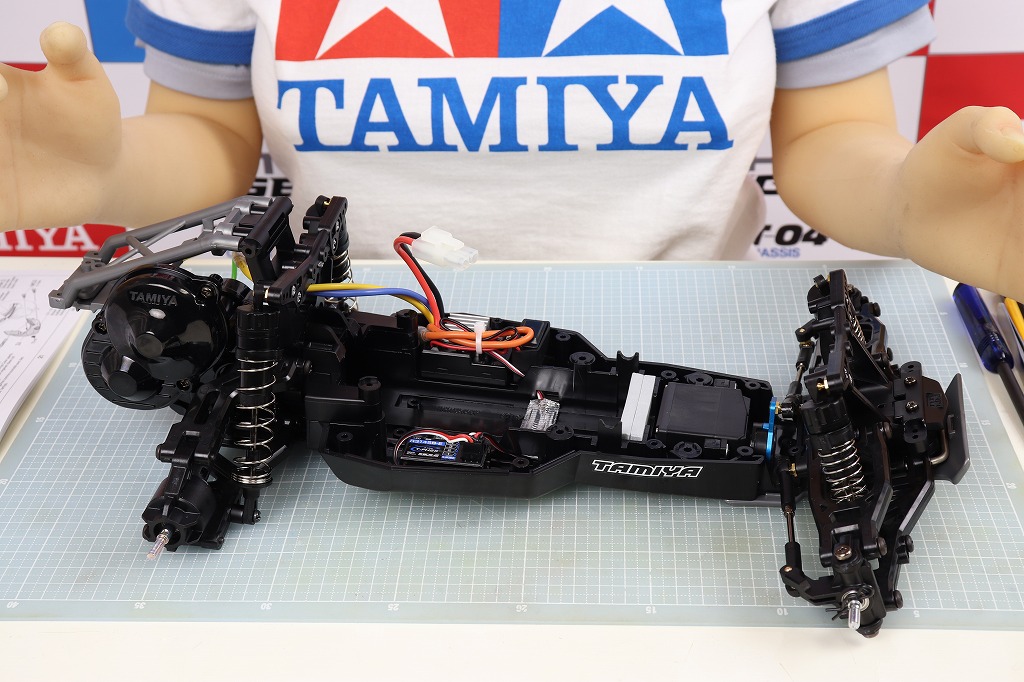
モーターケーブルを接続し、前後が合体しました。
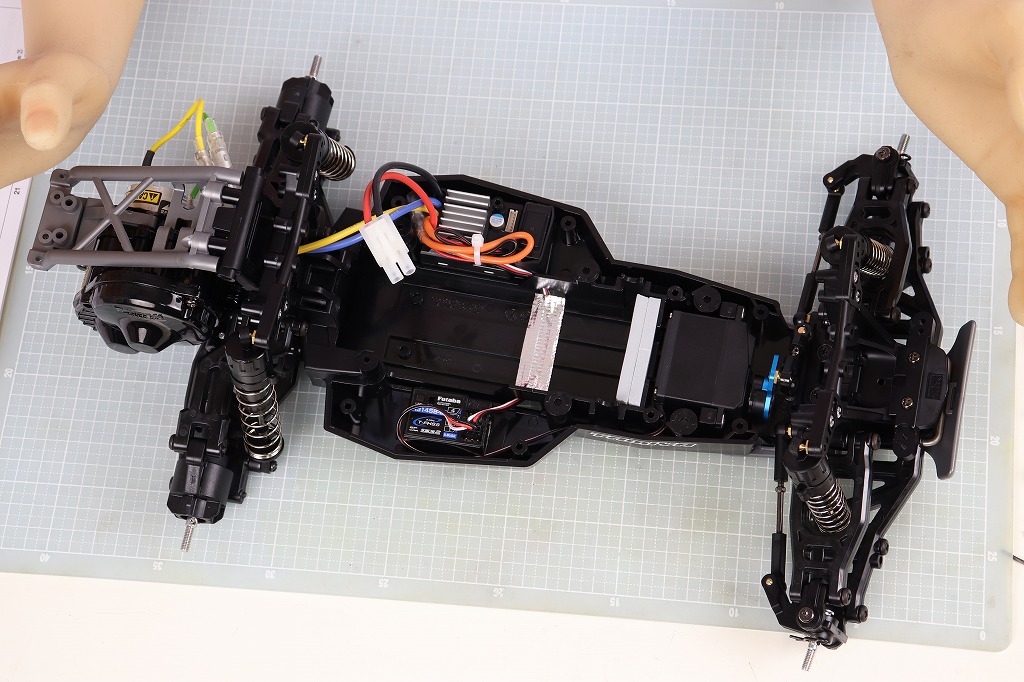
これで、動かすことができます。

一応、動作確認をしておきましょう。

よし、バッチリです。サーボをリバースにする必要がありますが、それ以外は何の問題もありません。

ここまで来れば一安心です。