ドールと京商「オプティマミッド」 (組立編3)

続きを始めます。

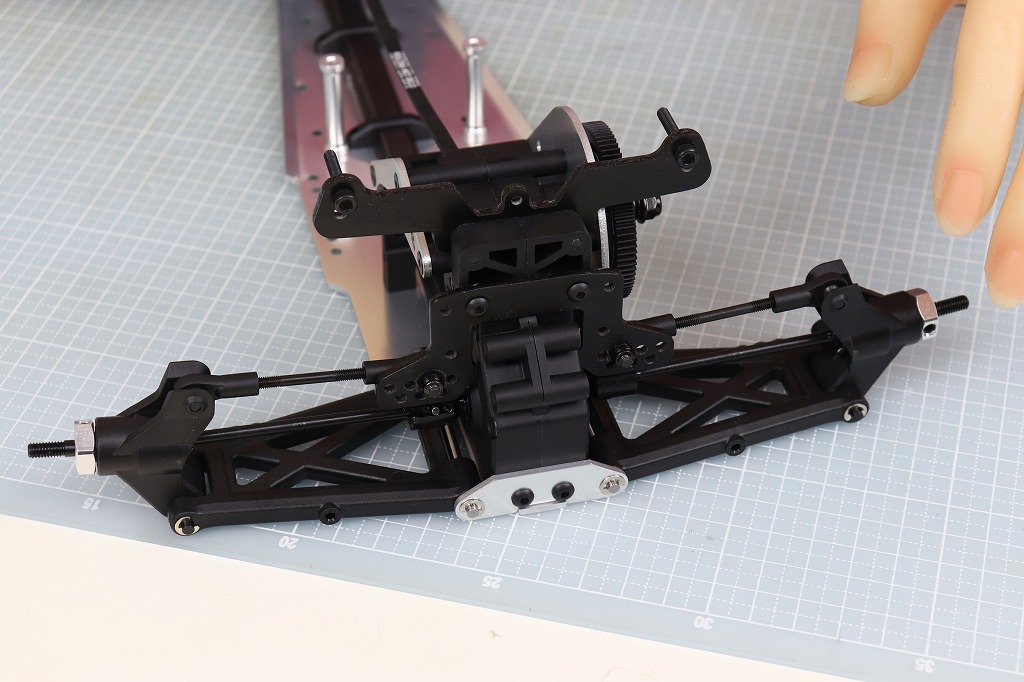
次は、リヤ部を仕上げていきます。まずは、タイヤを取り付ける部分、リヤサスペンションを作ります。

これにアームを付け…

リヤ部に取り付けます。

ここで、同じ長さのロッドを2本作り…

接着剤で補強した黒いプレートに取り付けます。

これとドライブシャフトをセットして…
リヤ部の完成です。
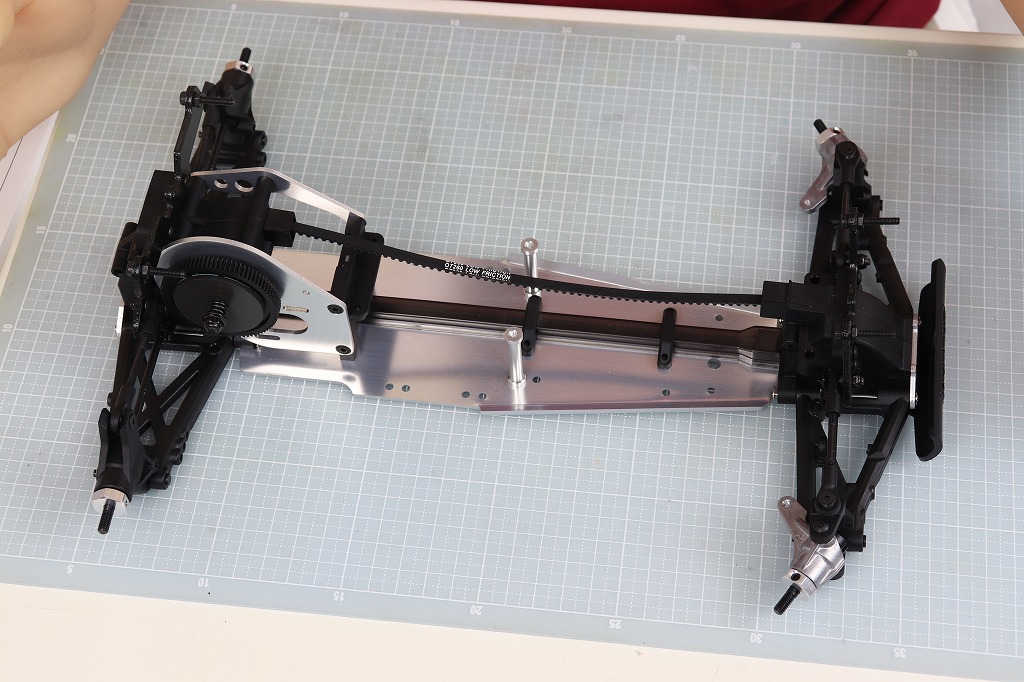
ということで、ここまでできました。

ここから、再びフロント部に戻ります。同じ長さのロッドを2本作り…

これを使って、ステアリング部分を作ります。

こんな感じです。

これを取り付けて…
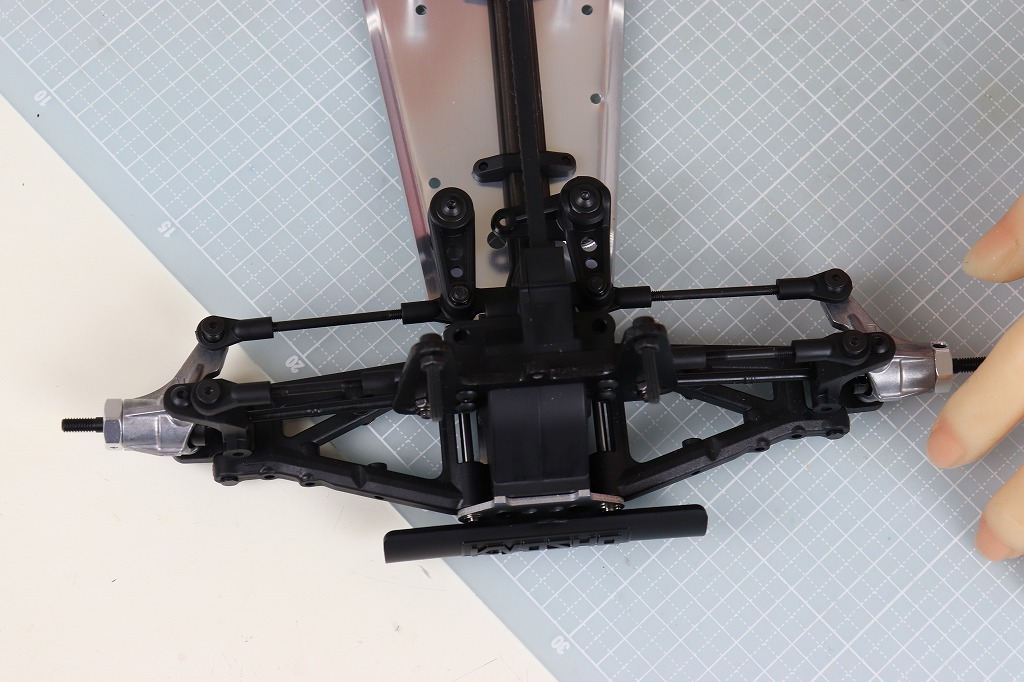
左右がリンクしました。これで、本当にフロント部の完成です。

ここから、最後「E」の袋を使います。

中には、バンドや黒いプレート、バネやオイルなどが入っています。

ちなみに、黒いプレートはFRPなので、今まで通り外周をヤスリ掛けし、接着剤を塗って補強しておきます。

そして、ここからオイルダンパーを組み立てます。

とりあえず、必要なパーツを用意しました。

オイルダンパーの組み立てには専用の工具が必要なので、先に作って用意しておきます。

まずは、黒いパーツに黒いOリングを、金色のパーツに透明な輪っかをセットします。

で、金色のパーツでピストンを作ります。

シリンダーにオイルを入れます。

ピストンを挿入し、専用工具を使ってしっかりとフタをします。

オイルで手がベタベタです。

あとは、バネを付けて…

オイルダンパーの完成です。短い方がフロント、長い方がリヤです。

フロントダンパーを取り付けます。
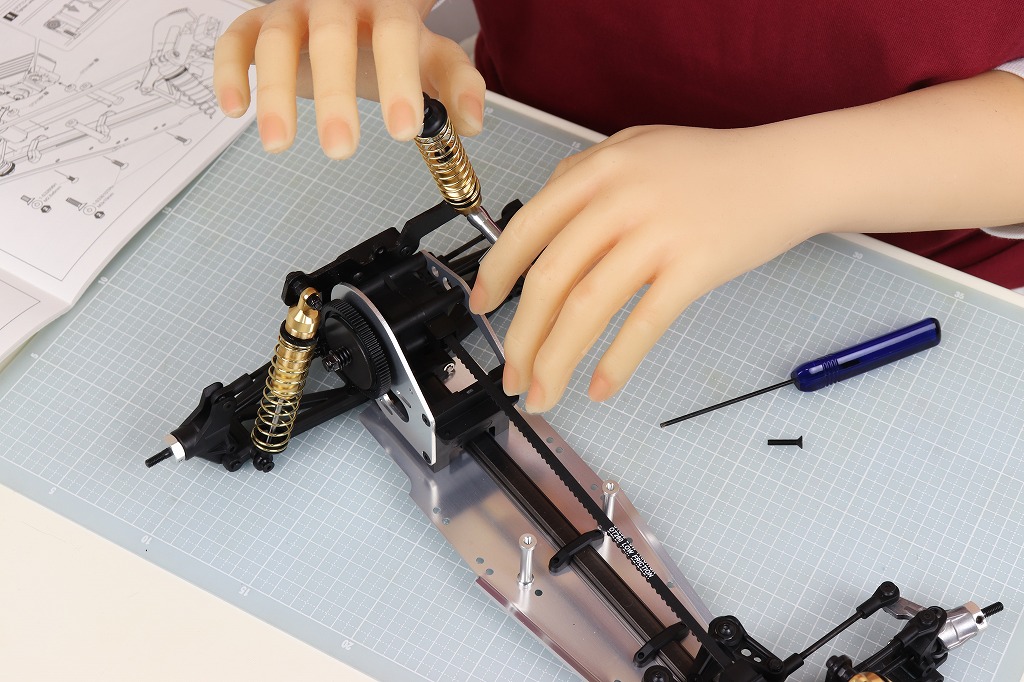
さらに、リヤダンパーも付けて…
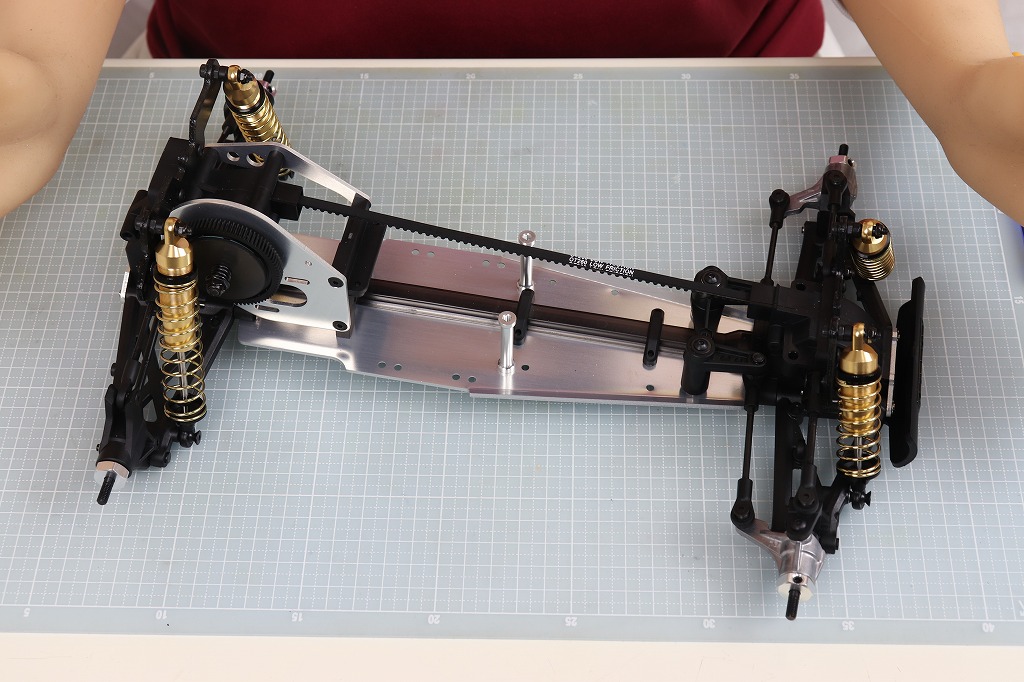
足回りが安定しました。

ゴールドのダンパーは高級感があります。

ここで、電動パーツの出番です。
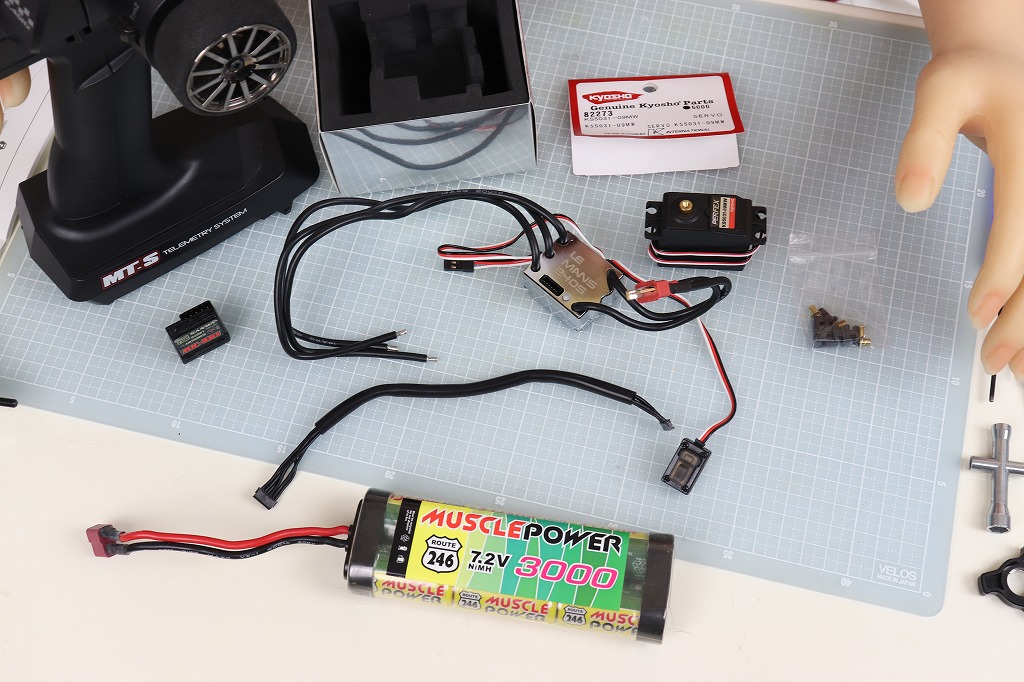
開封しました。
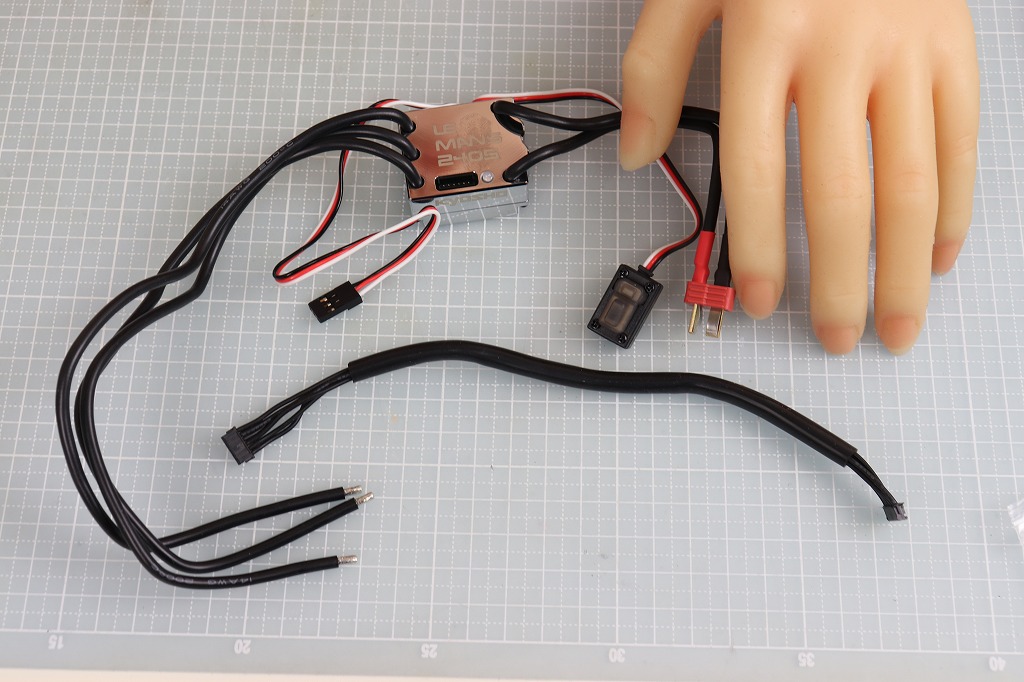
スピードコントローラー「ル・マン 240S ESC」は、リニューアル版で、以前は別売りだったセンサーケーブル(200㎜)が最初から付属しています。

しかも、モーターケーブルがはんだ付けしやすいように加工済みです。
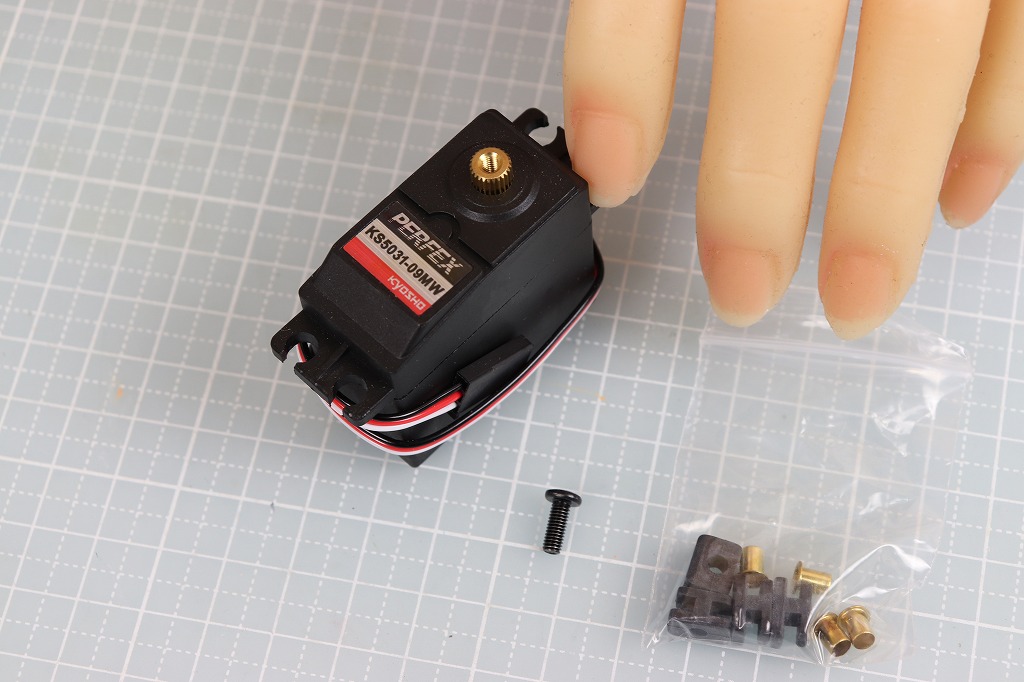
サーボ「KS5031-09MW」は、一般的なサイズのデジタルサーボです。サーボセイバーのネジは、RCカー本体には付属していないので、サーボに付属のネジを使います。

そして、プロポと受信機ですが、当初、サンワの「MT-S」と「RX-481」を使う予定でしたが、フタバの「4PV」と「R314SB-E」に変更します。
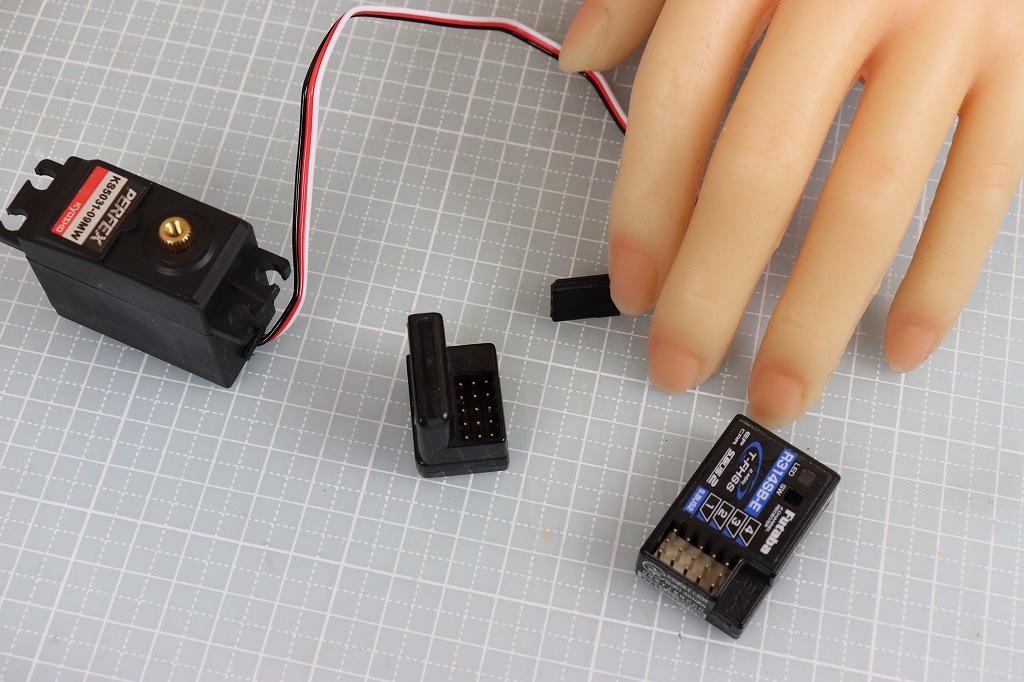
その理由は、サーボのコネクタがサンワの受信機に刺さらないからです。角を削って面取りすれば刺すことは可能ですが、かなり削る必要があり、面倒なのでフタバの受信機に変更します。

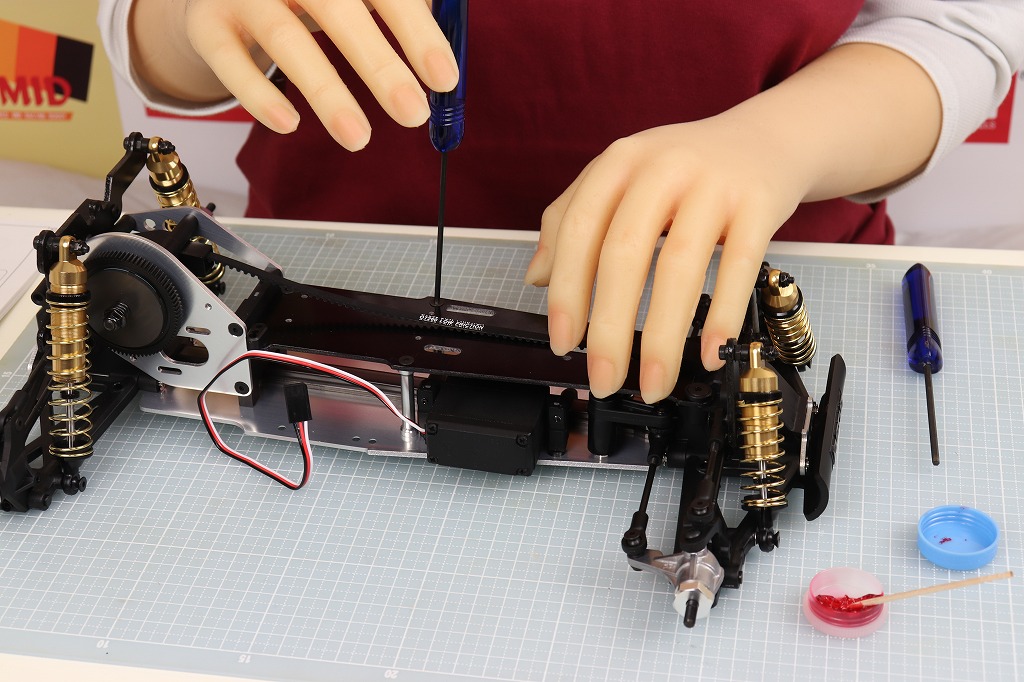
電動パーツを接続し、サーボのニュートラルを確認します。…よし、確認しました。

ロッドを1本作り…
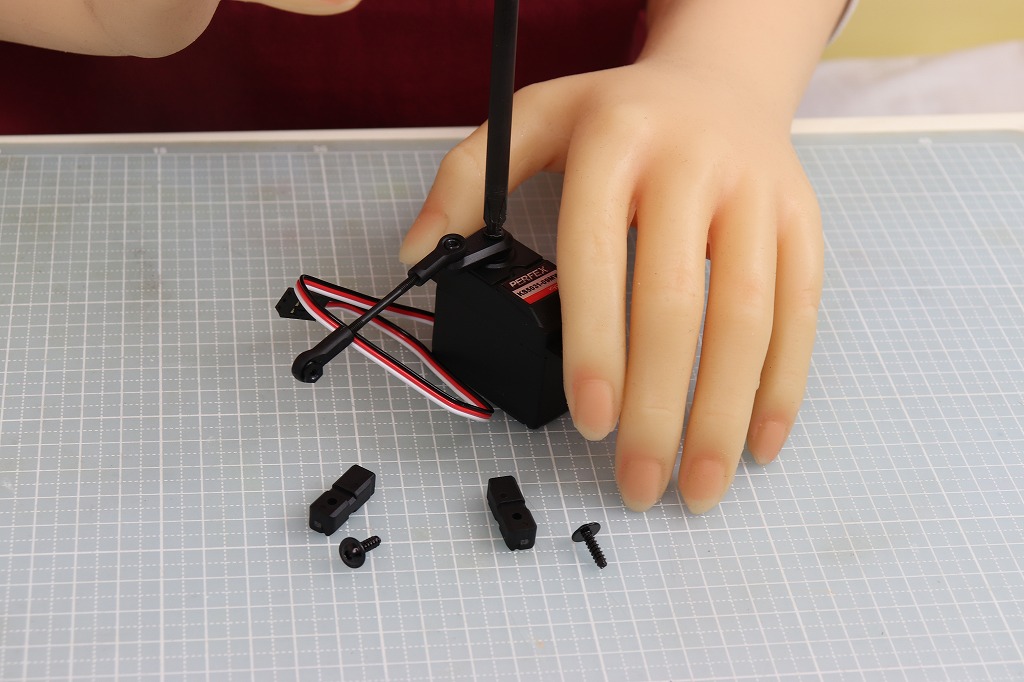
これをサーボセイバーに付け、サーボに取り付けます。
で、サーボを裏からシャーシに固定します。
こんな感じです。少しはみ出ていますが問題ありません。
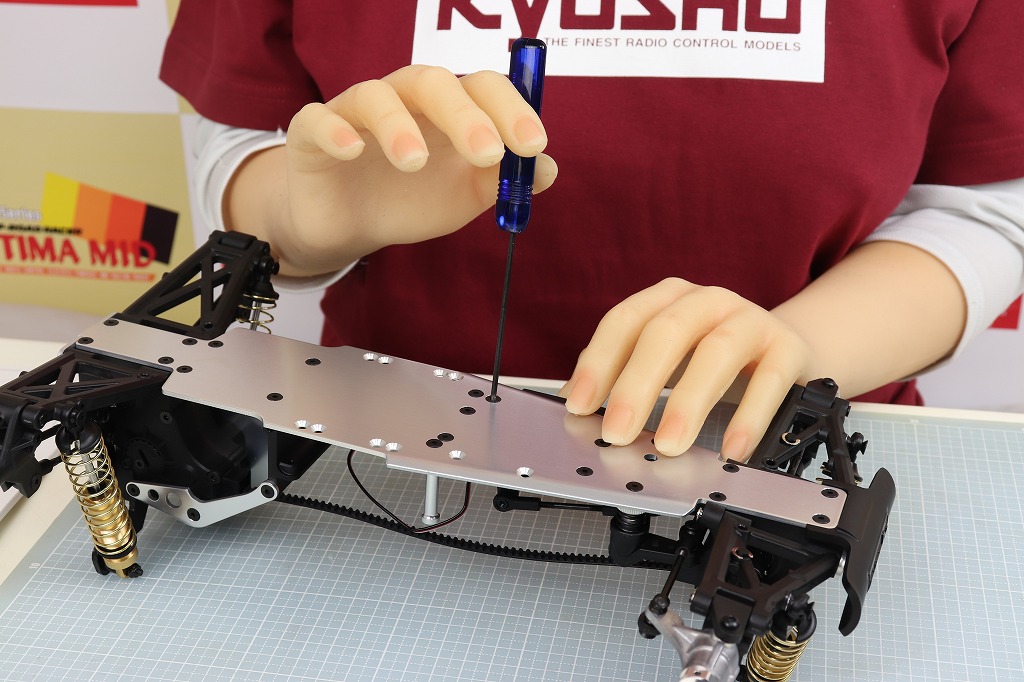
サーボの上に、接着剤で補強したアッパーデッキを取り付けます。
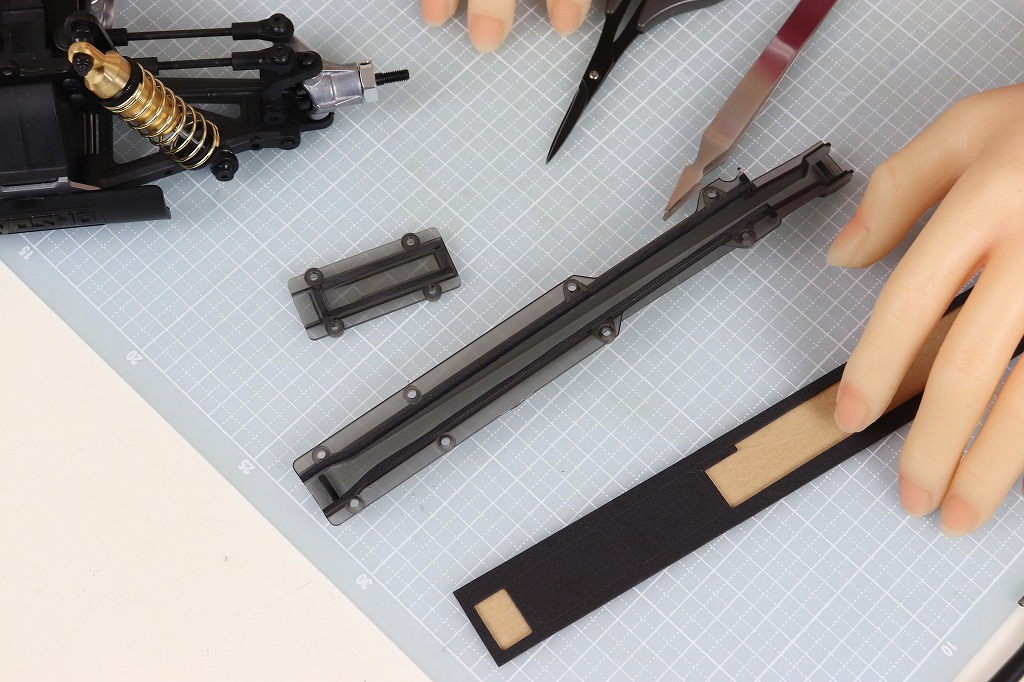
ここで、ベルトカバーにスポンジを貼ります。
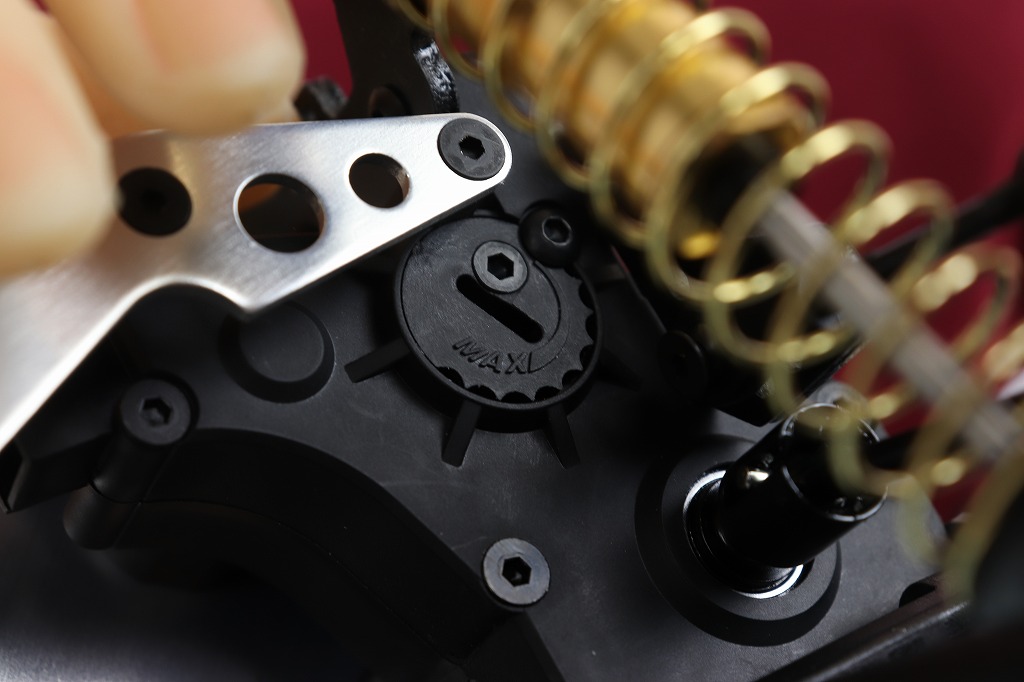
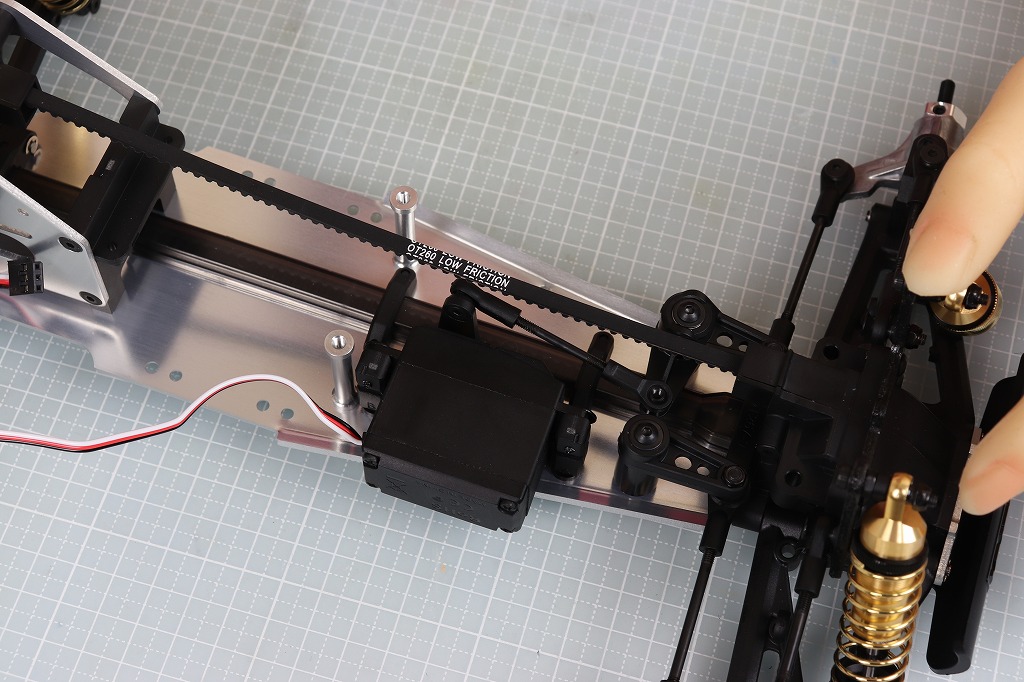
ベルトカバーを付ける前に、ベルトの張りを調節します。調節は、リヤ部の丸いパーツを回転して行います。
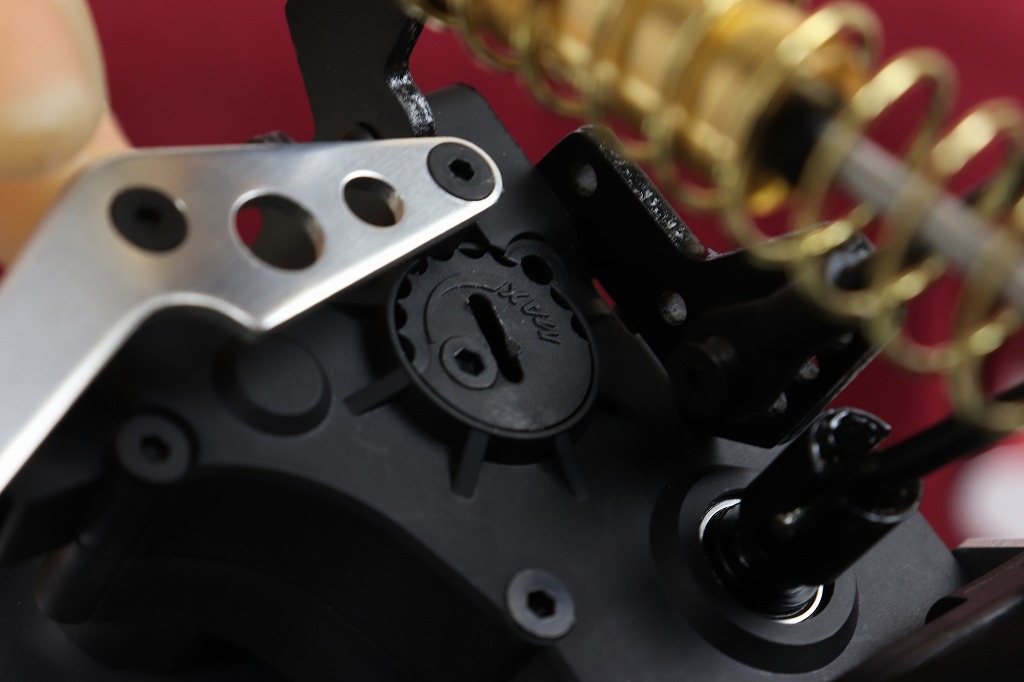
ベルトの調節範囲は、1段目~10段目まであり、1段目が最も緩い状態、10段目が最も張った状態になります。マニュアルでは8段目に指示されているので、一旦ネジを外し、マイナスドライバーで左に回転し、この位置で再びネジで固定します。
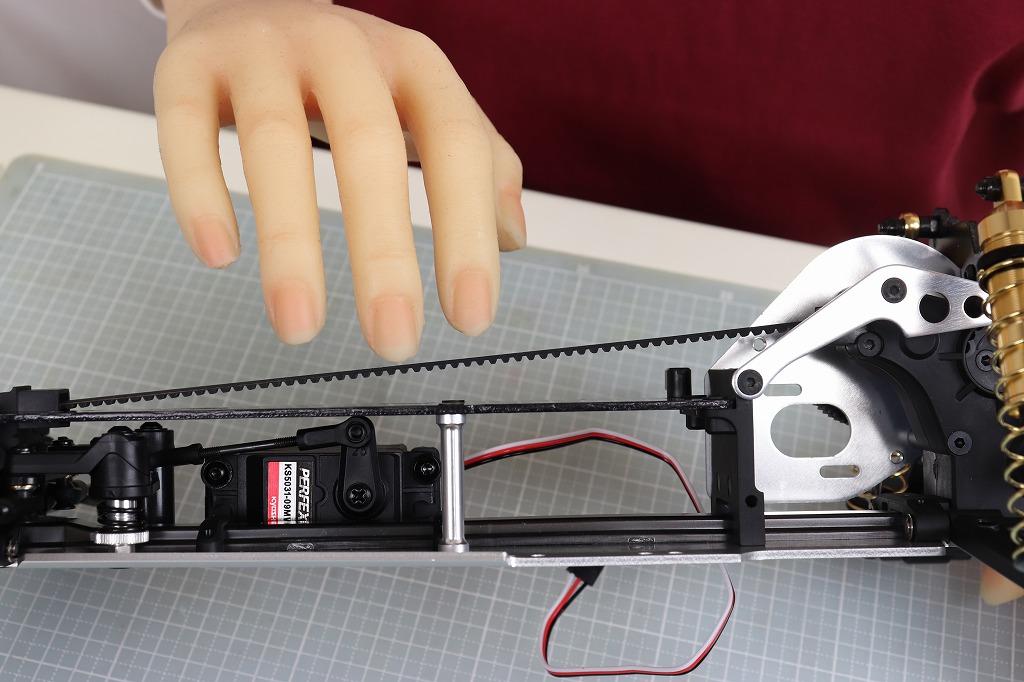
ベルトがピンと張りました。

ベルトカバーを付けて…
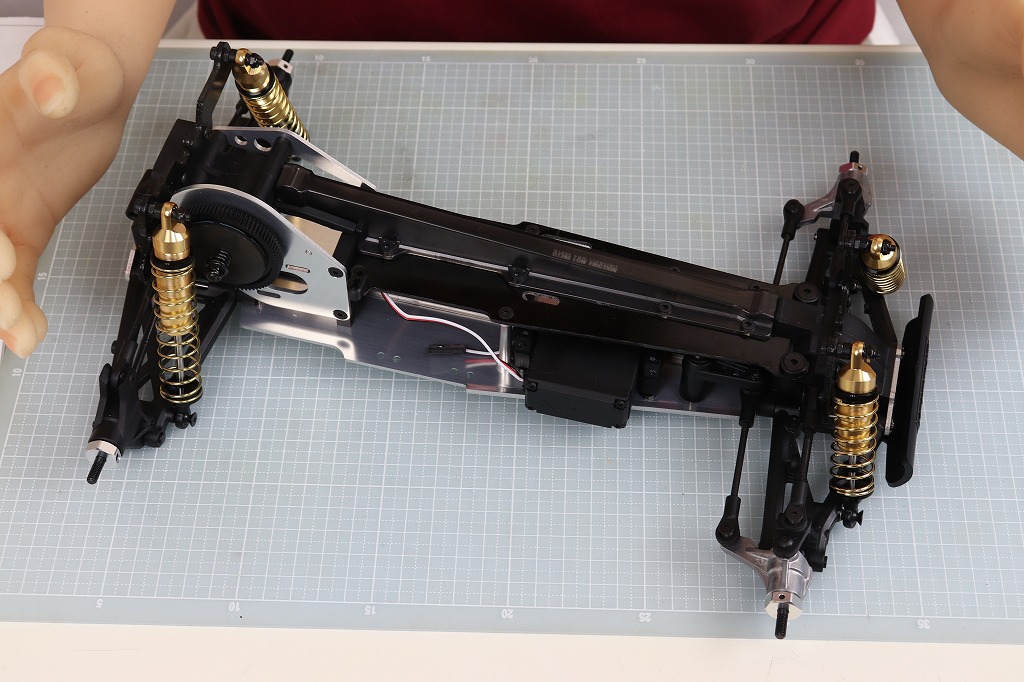
ここまでできました。

ここで、マニュアルの順番を変え、先にスピードコントローラーと受信機を搭載します。
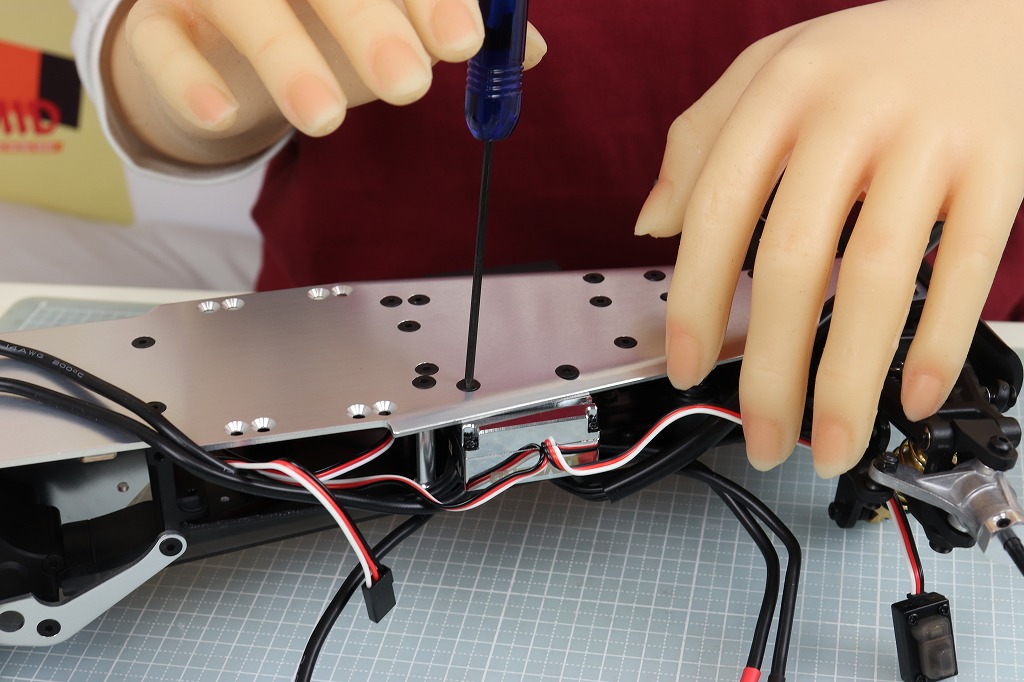
スピードコントローラー「ル・マン 240S ESC」は、シャーシに直接ネジで固定することが可能です。
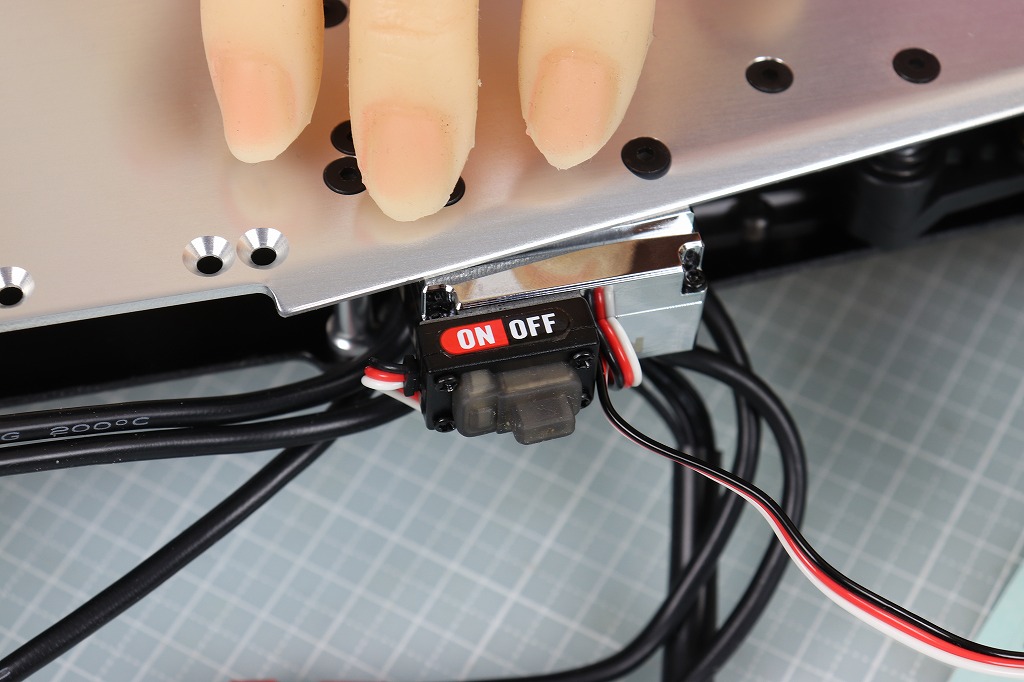
スイッチはスピードコントローラーのサイドに両面テープで貼り付け、ON-OFFシールを貼っておきます。
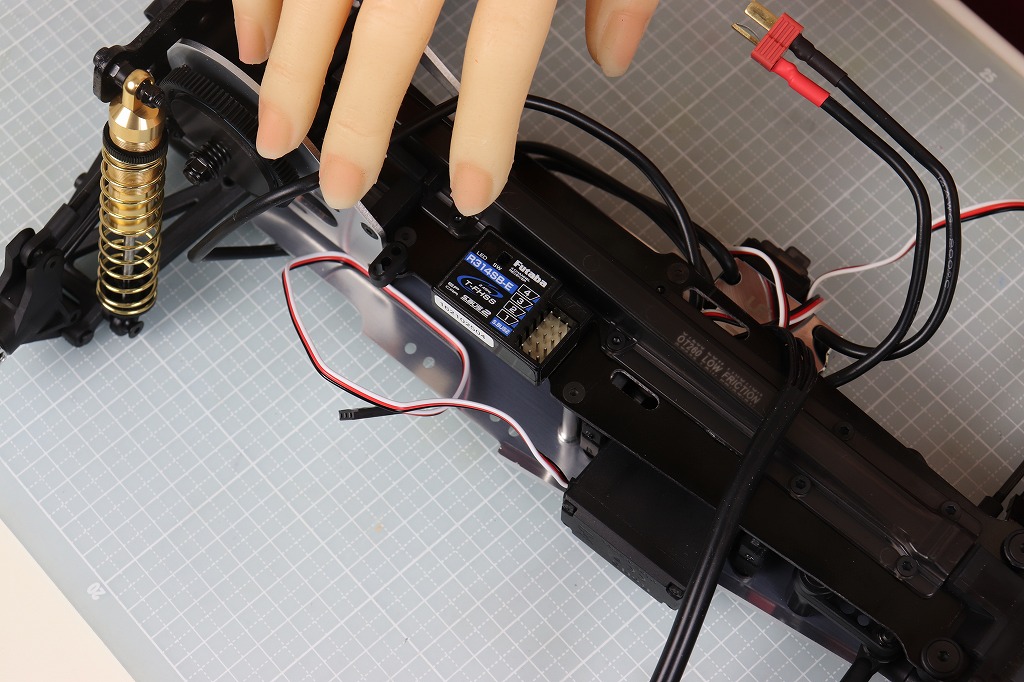
受信機は、この位置に両面テープで貼り付けました。アンテナパイプは付けません。
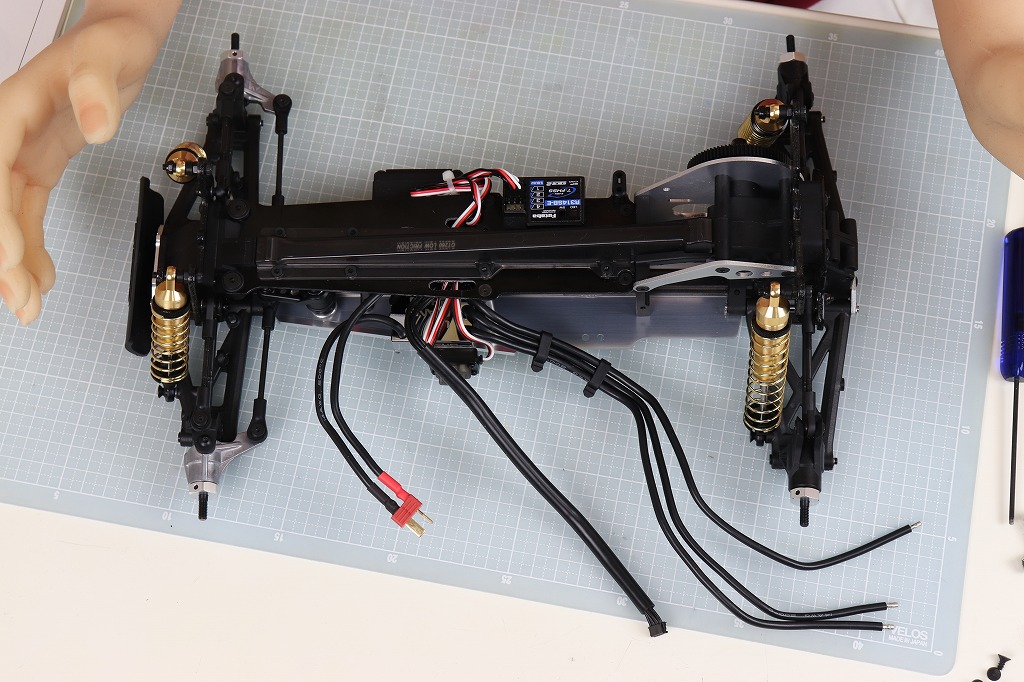
ケーブルをバンドでまとめて、モーターとバッテリー以外の電動パーツの搭載完了です。バンドは付属していないのでタミヤの余りを使いました。

次回は、いよいよモーターのはんだ付けです。